Komplexe Entwicklungsprojekte
Von 120-kg-Handhabungssystemen bis zur Hochgeschwindigkeits-Dosenrotation: fünf Projekte aus mechanischem Design, Handhabungstechnik, Automatisierungstechnik und technischer Dokumentation.

01
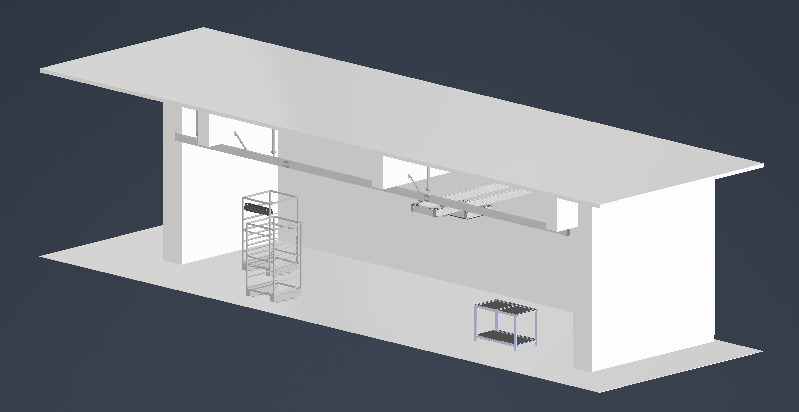
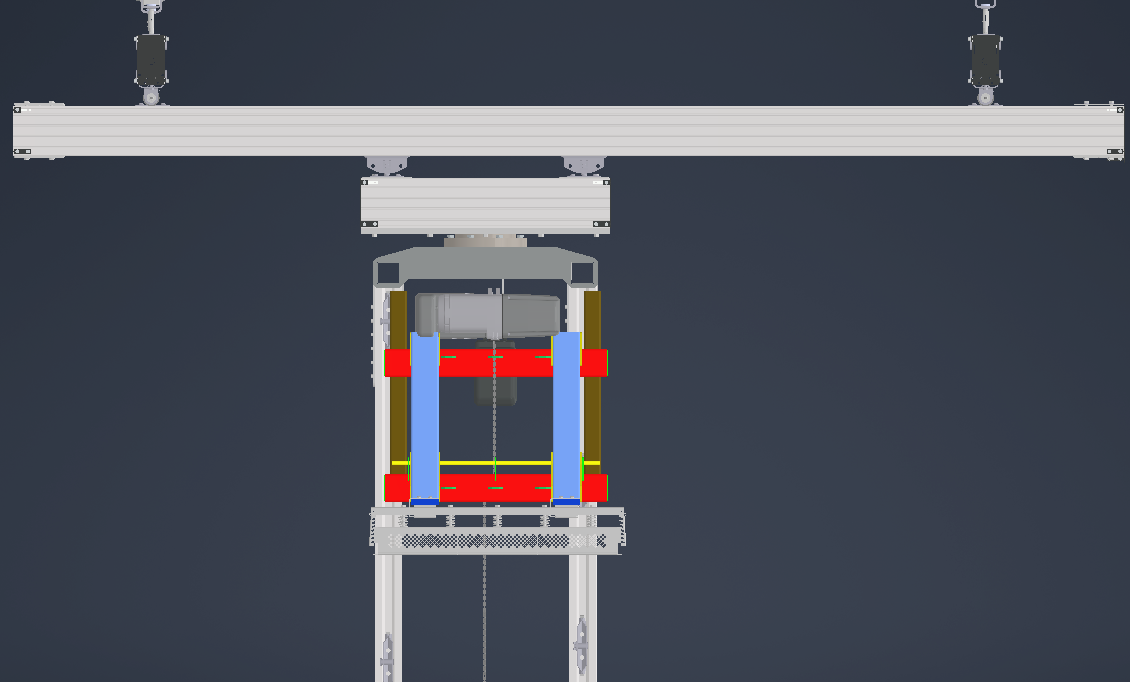
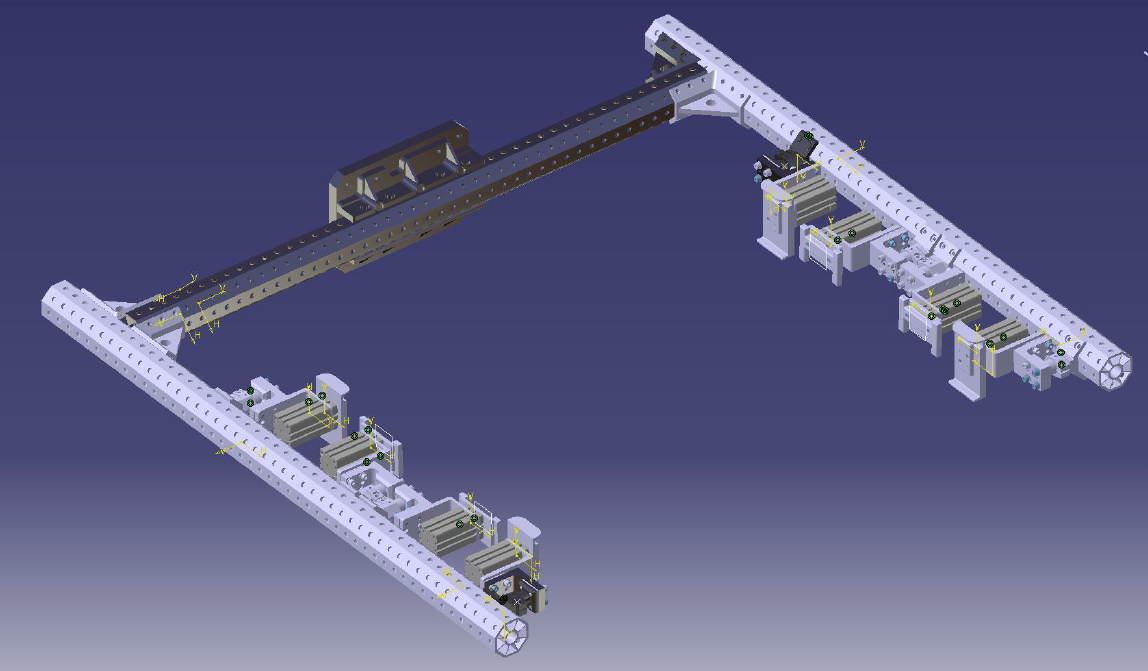
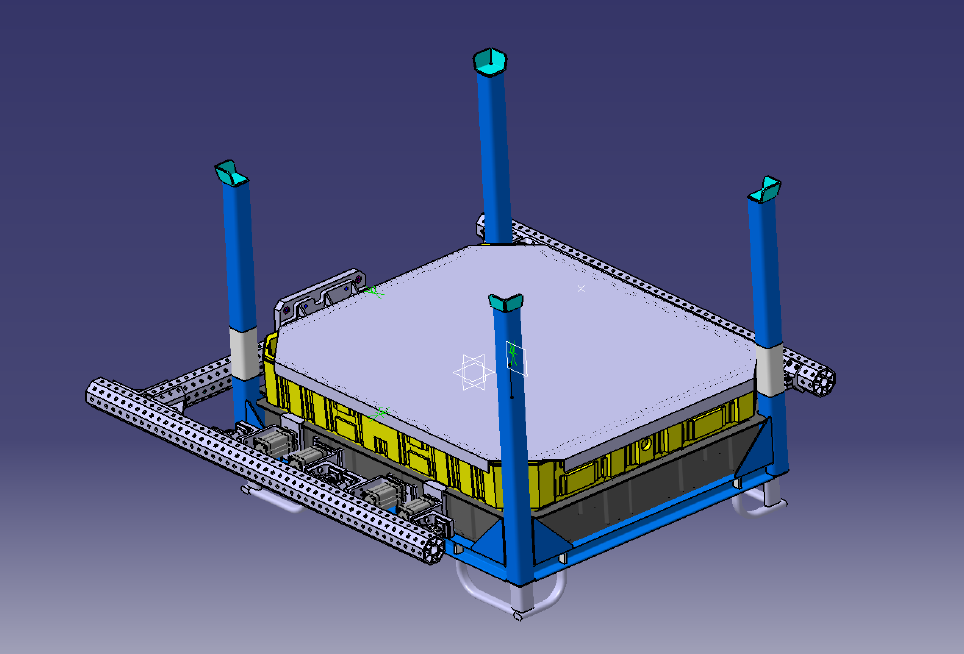
120-kg-Handhabungssystem für Fleischkäfige
Konstruktion eines großen Handhabungssystems für eine Halle von ca. 16000 x 5000 mm. Das System bewegt sich in X, Y und Z und ermöglicht eine 360°-Rotation um die Z-Achse.
Mehr anzeigen
Bei diesem Projekt mussten Bauraum, Lebensmittelumgebung, Materialauswahl, Gewicht, Lastaufnahme und Spannungsbetrachtung gleichzeitig berücksichtigt werden. Zusätzlich wurden zahlreiche Einzelteile konstruiert, damit das Lastaufnahmemittel sicher positioniert, bewegt und kontrolliert werden kann. Ein wichtiger Detailpunkt war das Sensorgehäuse: die Dimensionen mussten so ausgelegt werden, dass eine Neigungsbewegung sauber erkannt und die Z-Bewegung des Systems zuverlässig angesteuert werden kann.

02
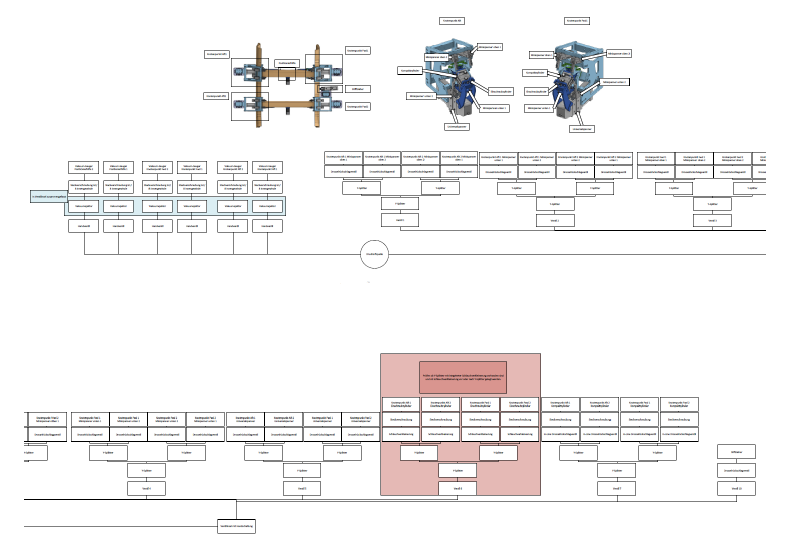
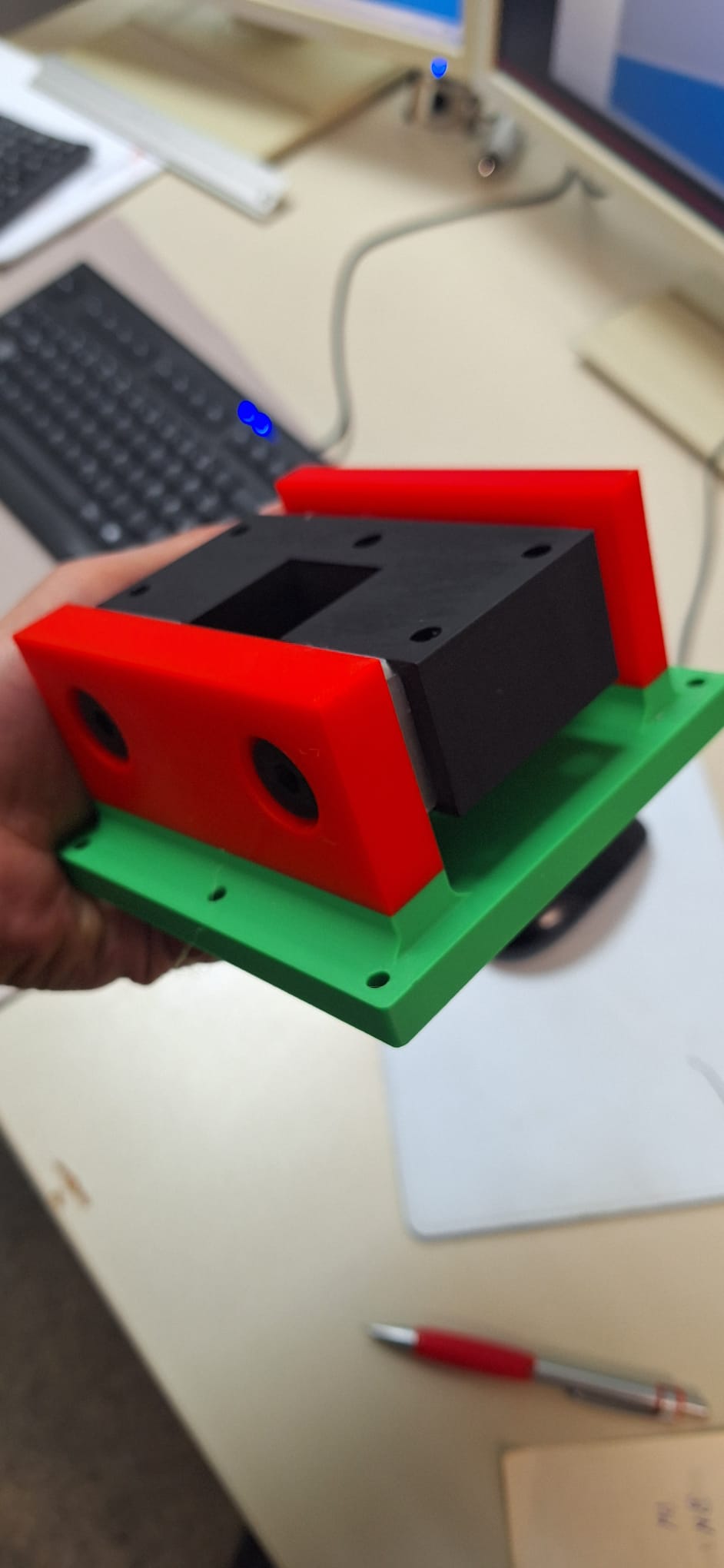
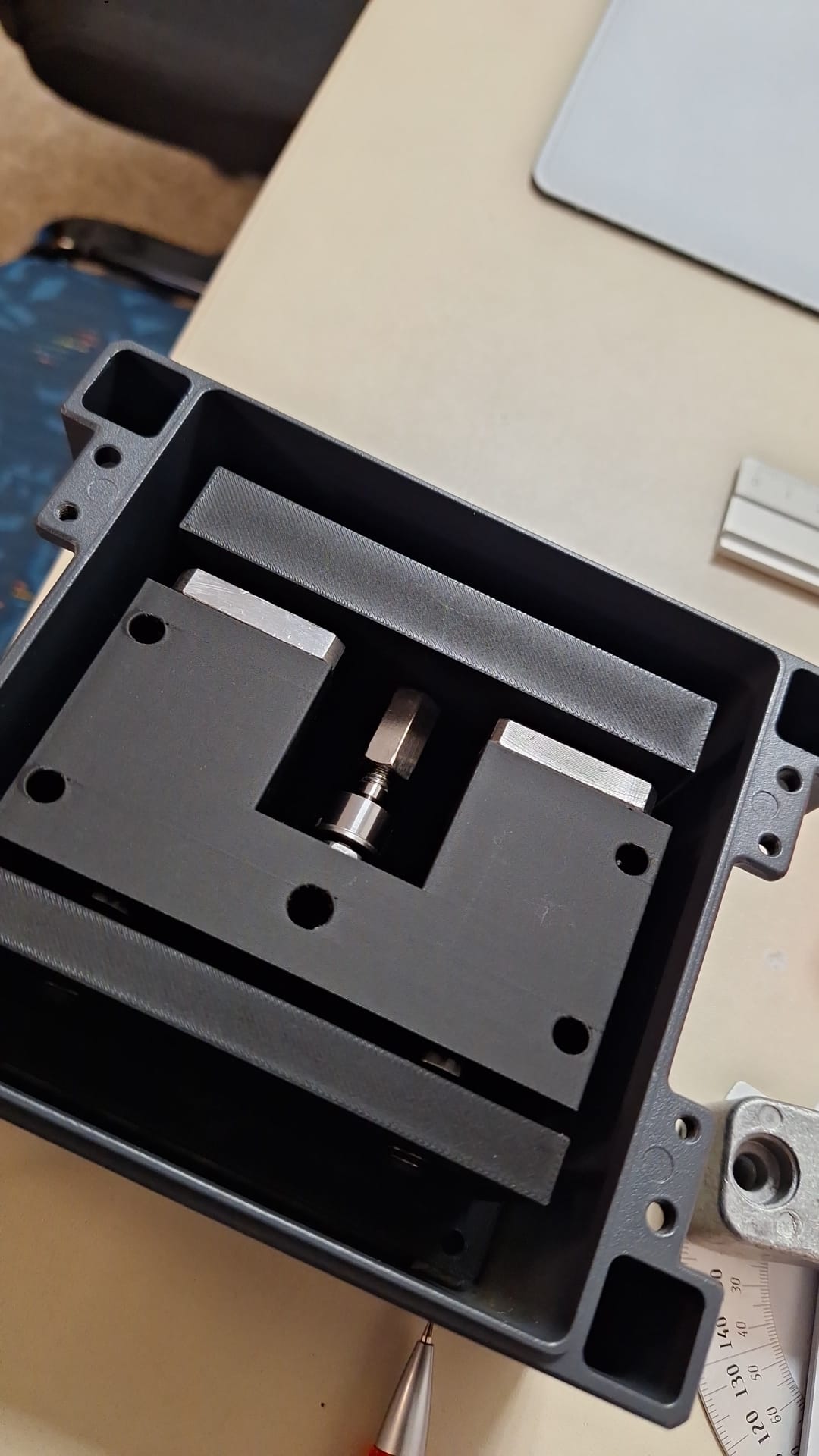
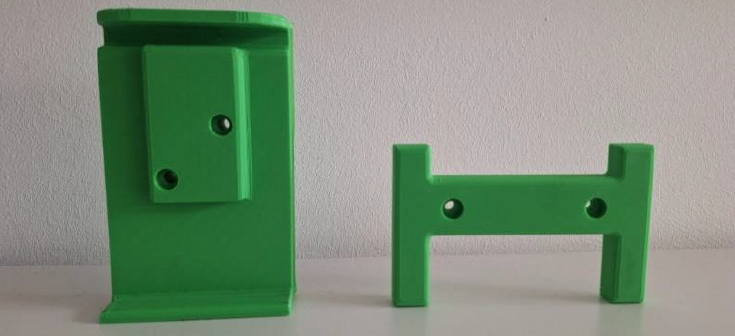
Robotergreifer mit 180°-Box-Rotation
Entwicklung eines Greiferwerkzeugs für Boxen bis ca. 15 kg mit pneumatischen Aktuatoren, EGT-Aluminiumprofilen und eigenentwickelten Endeffektoren.
Mehr anzeigen
Aus dem Praktikumsbericht geht hervor, dass der Greifer die Box sicher in X-, Y- und Z-Richtung fixieren sollte, um eine stabile 180°-Drehung zu ermöglichen. Die Konstruktion wurde in CATIA V5 aufgebaut, einschließlich Rahmenstruktur, Aktuatorauswahl, Positionierung, Einbauabständen, Endeffektoren, 3D-gedruckten Prototypen, 2D-Zeichnungen und Stückliste. Besonders wichtig waren Toleranzen, Kontaktflächen, Sicherheitsabstände und die mechanische Integration am Roboterarm.

03
180°-Dosenrotation in einer Produktionslinie
Entwicklung eines Mechanismus, der eine Dose auf engem Raum während einer schnellen Massenproduktion kontrolliert um 180° drehen kann.
Mehr anzeigen
Ziel war eine ruhige und schonende Drehbewegung mit möglichst geringer Reibung an der Dosenoberfläche. Die Herausforderung lag in der begrenzten Strecke, dem hohen Durchsatz und der Notwendigkeit, eine reproduzierbare Rotation ohne Störung des bestehenden Produktionsflusses zu realisieren.

04
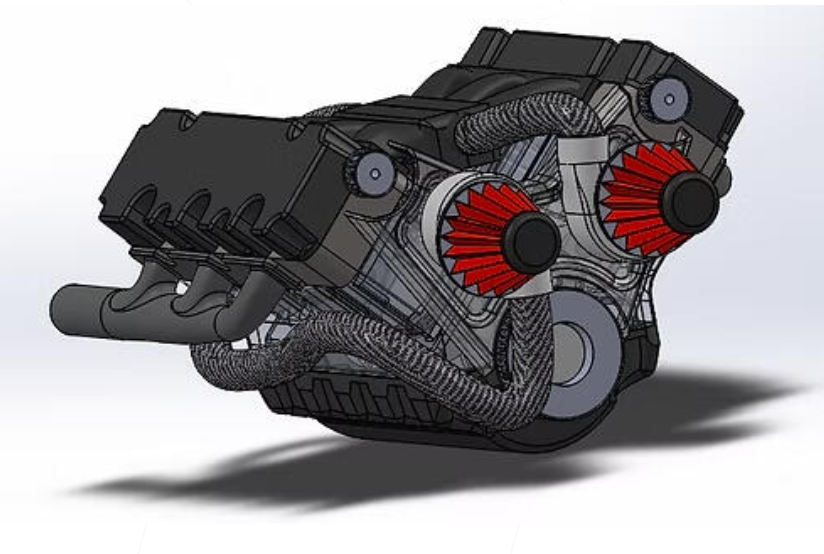
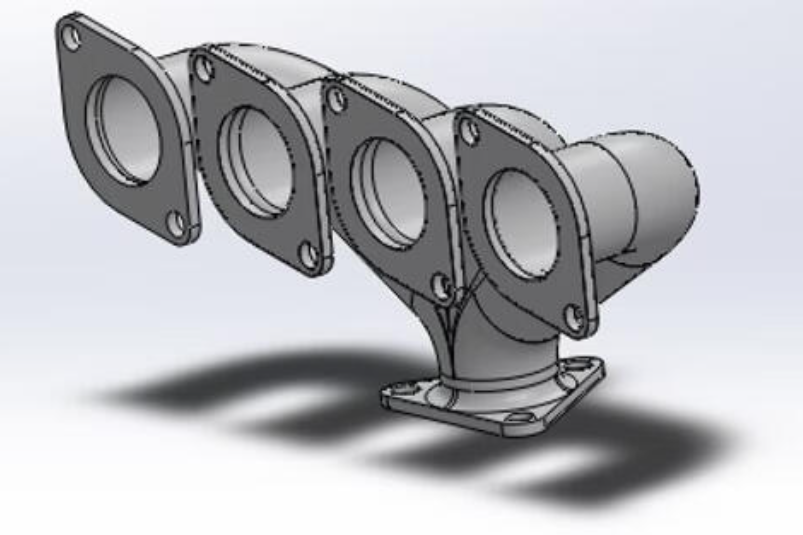
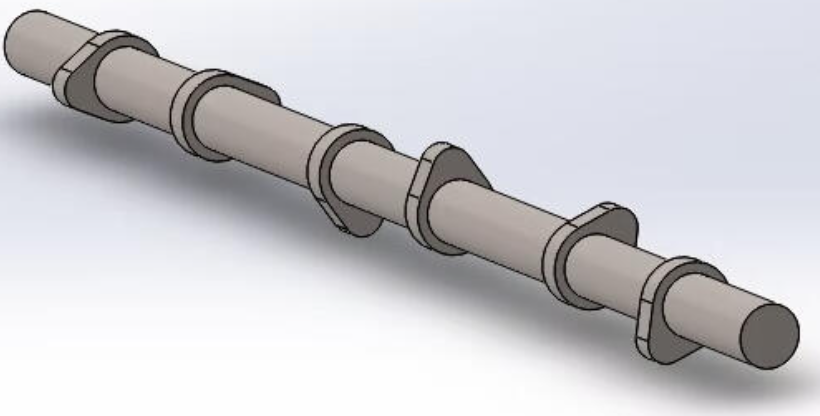
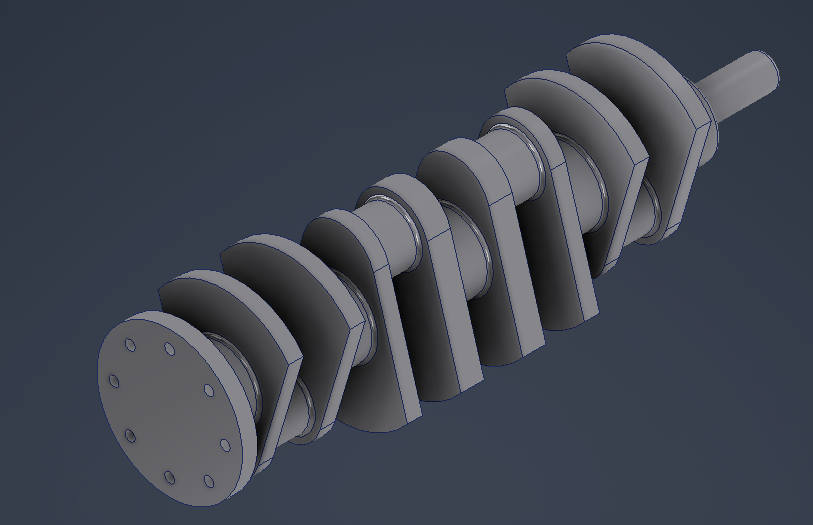
V6-Twin-Turbo-Motor – eigenständiges CAD-Projekt
Eigenständig umgesetztes CAD-Projekt zur detaillierten 3D-Modellierung eines komplexen Motors mit vielen Einzelkomponenten.
Mehr anzeigen
Die 2D-Zeichnungen der Einzelteile dienten als Grundlage, die 3D-Modellierung wurde eigenständig umgesetzt. Die Komplexität entsteht durch die Vielzahl der Bauteile, die Turbolader, Rohrverläufe, Krümmergeometrien, Wellen und Gehäusestrukturen. Entscheidend waren korrekte Proportionen, saubere Geometrie und ein nachvollziehbarer Gesamtaufbau.
05
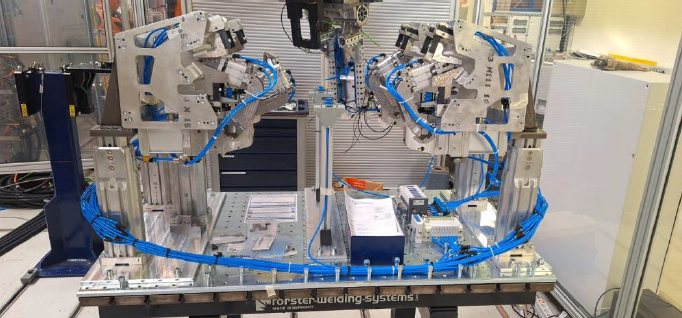
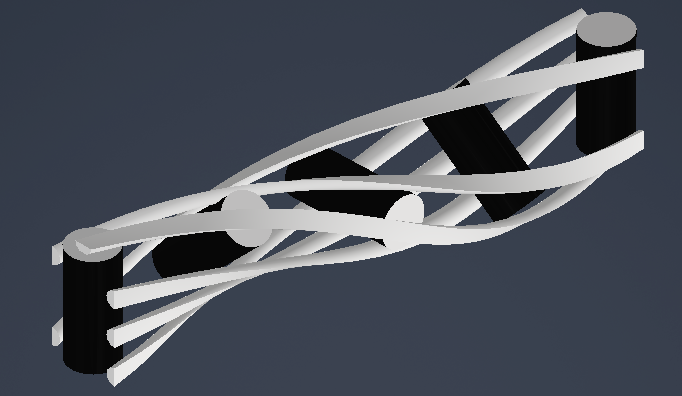
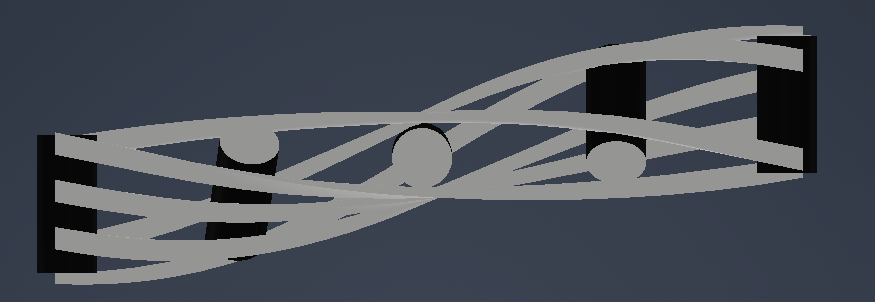
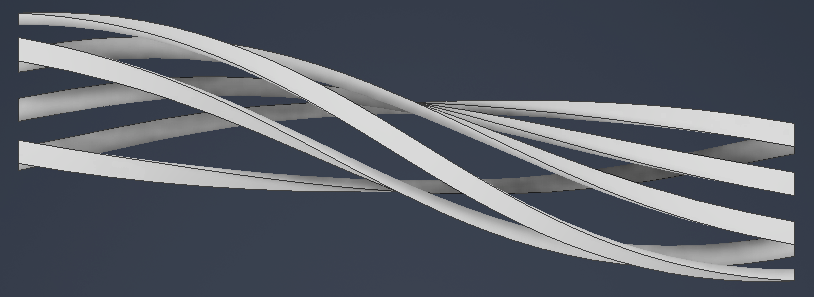
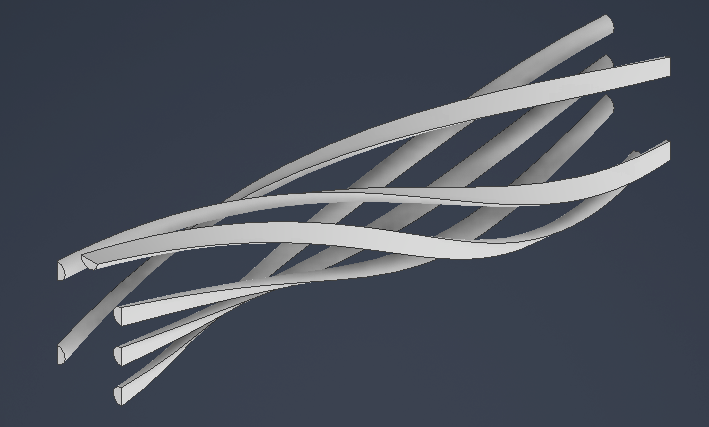
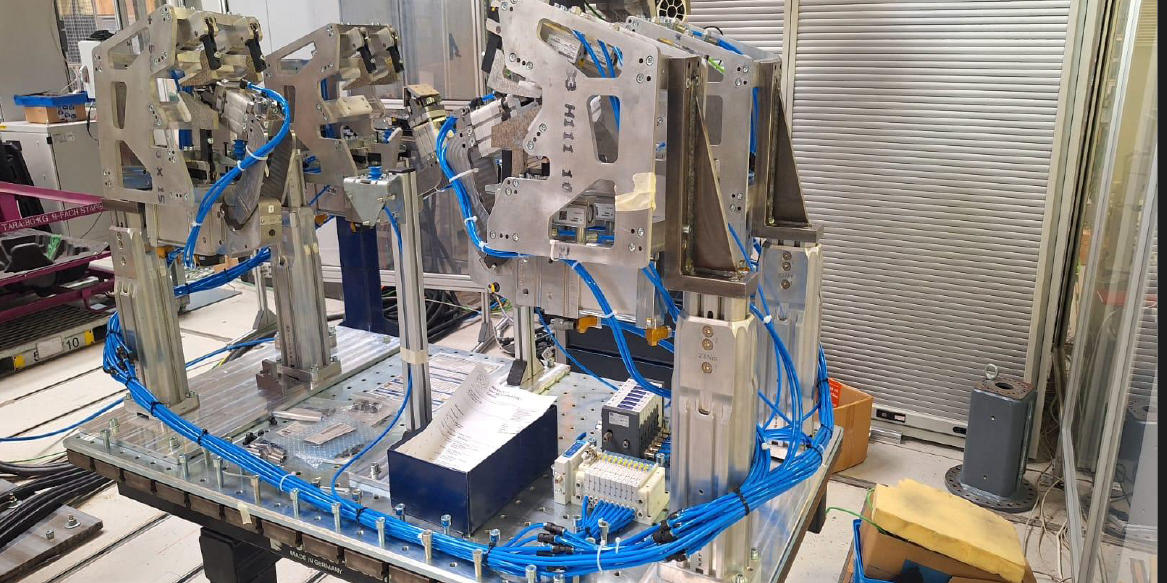
Pneumatische Baugruppe für Präsentationszwecke
Aufbau einer symmetrischen pneumatischen Schlauchführung für mehrere Aktuatoren inklusive Steuerungspositionen und Anschlussschema.
Mehr anzeigen
In diesem Projekt mussten zahlreiche Schläuche geordnet, funktional und visuell sauber an pneumatische Aktuatoren angeschlossen werden. Da die Baugruppe für Präsentationszwecke eingesetzt wurde, waren Symmetrie, Zugänglichkeit, verständliche Anschlusslogik und eine klare Platzierung der Steuerungselemente besonders wichtig.