Computer Vision & CNC-Prozessautomatisierung
Object Pose Estimation for CNC Machining Processes
Ein industrielles Vision-System zur Erkennung von Bauteilen und zur 6D-Lagebestimmung auf Basis von RGB-D-Daten, korrigierter Punktwolke, YOLO-Erkennung und FoundationPose.
Projektüberblick
Vom Kamerabild zur nutzbaren Bauteilpose
Das Projekt verbindet Objekterkennung, Kamerakalibrierung, Punktwolkenkorrektur und CAD-basierte Pose-Schätzung zu einem technischen Workflow für Bearbeitungs- und Automatisierungsprozesse.
Intensitätsbild, Tiefenbild und Kameraparameter als Basis für die Geometrie.
Lokalisierung des Bauteils, Klassenzuordnung und ROI für die Pose-Schätzung.
STL-Modelle werden mit den korrigierten RGB-D-Daten zur 6D-Pose verbunden.
Mehransichten können die Pose weiter verfeinern und Messabweichungen reduzieren.
Pipeline
Die Korrektur der Geometrie kommt vor FoundationPose
FoundationPose arbeitet auf den RGB-D- und Punktwolkendaten. Deshalb wird die Kamera- und Tiefengeometrie zuerst sauber vorbereitet, bevor die Pose berechnet wird.
-
01
RGB-D-Aufnahme
Die Kamera liefert Intensität, Tiefe und intrinsische Parameter.
-
02
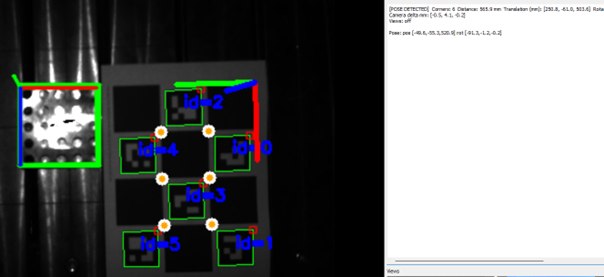
Kalibrierung
ChArUco- und Hand-Eye-Daten verbinden Kamera, Werkzeug und Koordinatensysteme.
-
03
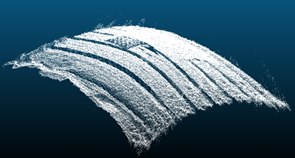
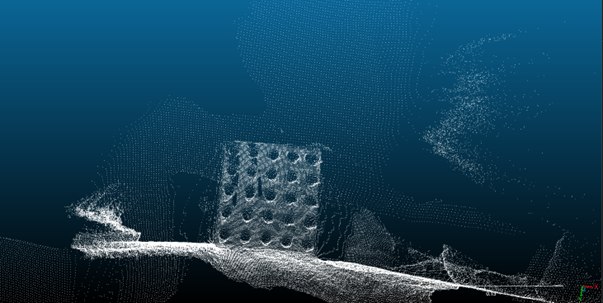
Punktwolke korrigieren
Fisheye- und Tiefenabweichungen werden vor der Pose-Schätzung bereinigt.
-
04
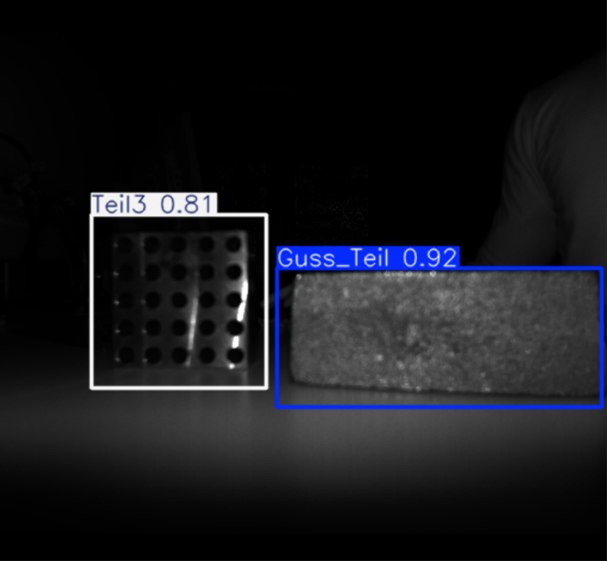
YOLO Detection
Das Bauteil wird erkannt, klassifiziert und als ROI an die Pose-Stufe weitergegeben.
-
05
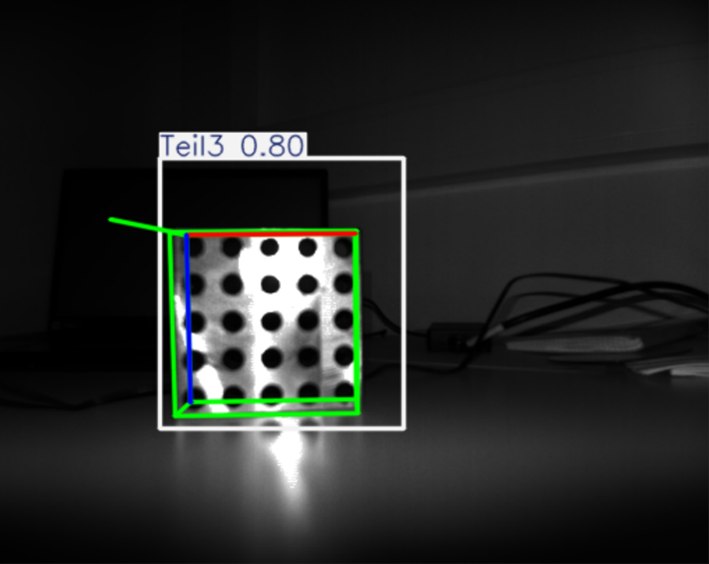
FoundationPose
Das passende CAD-Modell wird mit der korrigierten RGB-D-Geometrie abgeglichen.
-
06
Pose Output
Die Ausgabe ist eine 6D-Pose mit Translation, Rotation und optionaler ICP-Verfeinerung.
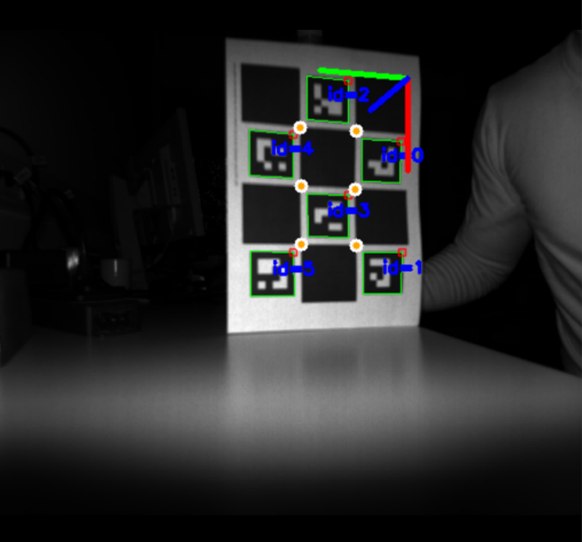
01 / Kalibrierung
Kamera, Werkzeug und Koordinaten vorbereiten
Die Kalibrierung ist die Grundlage dafür, dass Bilddaten, Tiefendaten, Roboterpose und Bauteilgeometrie im gleichen technischen Zusammenhang ausgewertet werden können.
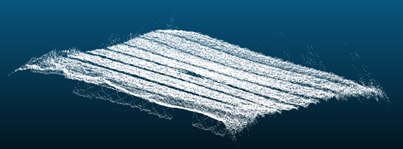
02 / Geometrie
Punktwolkenkorrektur vor der Pose-Schätzung
Vor FoundationPose werden Tiefenbild und Punktwolke korrigiert. Dadurch sieht der Algorithmus die Bauteilgeometrie in einer stabileren Form und arbeitet nicht auf verzerrten Rohdaten.
Bildvergleich anzeigen
Die Galerie zeigt den Unterschied zwischen verzerrter Punktwolke, korrigierter Punktwolke und einer Szenenansicht. Dieser Schritt war wichtig, weil die Pose-Schätzung direkt von der Qualität der Tiefengeometrie abhängt.
03 / Detection
YOLO liefert Klasse und ROI
YOLO übernimmt die schnelle Objekterkennung. Die erkannte Klasse entscheidet, welches CAD-Modell verwendet wird; die Bounding Box begrenzt den Bereich für die anschließende Pose-Schätzung.
04 / Pose Estimation
FoundationPose auf korrigierter RGB-D-Geometrie
FoundationPose nutzt die korrigierte Geometrie und das passende CAD-Modell, um die 6D-Pose des Bauteils zu bestimmen. Die Ausgabe kann anschließend für Bearbeitung, Prüfung oder robotische Weiterverarbeitung genutzt werden.
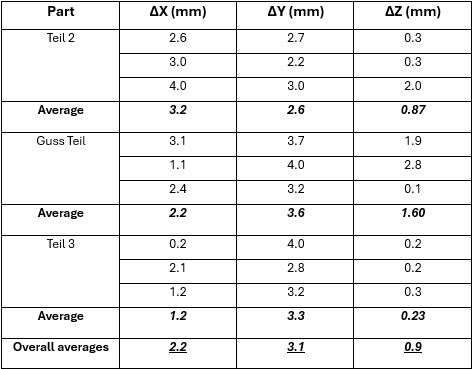
Validierung anzeigen
Die Ergebnisse wurden mit Mess- und Vergleichsdaten bewertet. Die Genauigkeitstabelle dokumentiert Positionsabweichungen und macht sichtbar, wo Kalibrierung, Tiefenkorrektur und Pose-Schätzung verbessert werden mussten.
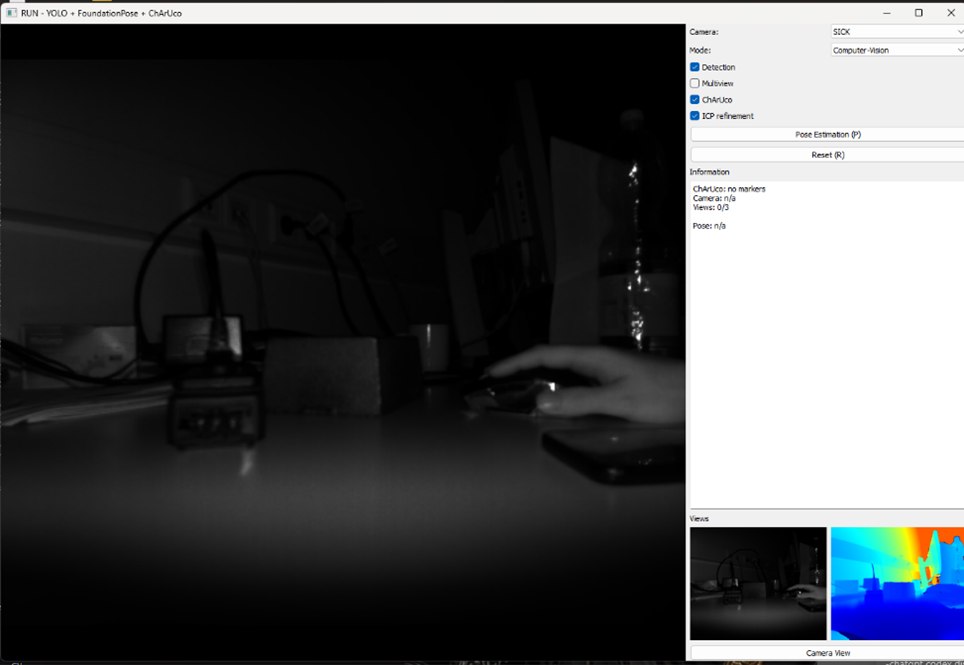
05 / Integration
Software-Pipeline für Tests und Auswertung
Die Software verbindet Kameraeingang, YOLO-Modell, CAD-Daten, FoundationPose, Punktwolkenansicht und Ergebnisvisualisierung. Dadurch konnte der gesamte Prozess iterativ getestet und verbessert werden.